[ Feldenkrais Method and Dynamic Systems ]
Mark Reese (2018) 칼럼 번역 2편

익숙한 과제의 요구 사항과 환경을 조작하여 끌개를 불안정하게 만들고 새로운 끌개가 나타나도록 도울 수 있다.
a) 공간 방향의 변경. 이 수업은 학습의 맥락 기반(context-based) 성격과 비록 암묵적이지만 행동의 필수 구성 요소로써 공간적 지향(spatial orientation)의 중요성에 대한 명확한 내용을 제공한다. 한 사람은 무릎을 지면과 직각으로 구부린 상태로 엎드린 상태에서 회외(supination) 및 내회(pronation), 배측(dorsi) 및 족저(plantar) 굴곡, 회전(rotation)을 포함하는 상당히 간단한 일련의 발 움직임을 수행하도록 요청받는다. 대부분의 사람들은 앉은 자세에서 이러한 움직임을 수행하는 데 아무런 어려움이 없다. 하지만 이러한 변형된 자세에서는 대부분 완벽히 수행할 수 없다. 서투르게 수행할 수 있는 경우에도 시각적 피드백 없이 사람들은 종종 공간에서 발의 위치와 발의 실제 움직임을 구별할 수 없다! 그런 다음 수업은 발을 시각적으로 추적하여 움직임을 보강하는 것으로 진행된다. 흥미롭게도 이것은 행동을 더욱 불안정한 상태로 만들어 사람을 더욱 혼란스럽게 만들고 방향감각을 잃게 해 조화를 이루지 못하게 만든다. 이것은 Edelman의 다중 모드 재진입 처리 개념(multi-modal reentrant processing concept)의 좋은 예이다: 사람은 이 위치에서 발의 움직임을 시각적 신호와 연관시킨 적이 없었기 때문에 시각적 추적은 예상대로 움직임을 개선하지 않고 작업 공간에 대한 또 다른 지각 행동(perceptual-action) 요구를 추가한다. 그러나 곧 시각적 신호는 사람들이 필요한 협응(coordination)을 배우는 데 도움이 된다. 그럼에도 불구하고 훨씬 더 도움이 되는 것은 학생들이 엎드려 눕는 새로운 자세로 정보를 전달하고 일반화할 수 있을 때까지 서로 다른 자세(서기, 등대고 눕기 등)에서 유사한 움직임을 수행하도록 요청받는 것이다.

b) 환경의 변경. 주로 핸즈-온 기술인 기능 통합(functional integration: FI)에서 학생은 다양한 방향으로 다양한 크기의 롤러(판지나 플라스틱 재료 또는 말려진 담요로 만들어진 통) 위에 놓을 수 있다. 예를 들어, 학생은 척추 아래에 세로로 배치된 길고 좁은 롤러 위에 눕도록 요청받을 수 있다. 이 환경은 롤러에서 떨어지기 쉽기에 새로운 균형 요구 사항을 만든다. 프랙티셔너는 롤러의 압력과 균형 요구 사항을 처리하기에 적합한 다양한 자세 및 움직임 패턴의 출현을 끌어내기 위해 다양한 방법으로 학생을 움직인다.
자원(support)
환경의 가장 중요한 변화 중 하나는 Feldenkrais 프랙티셔너가 더 나은 지원 조건을 제공하는 것이다. 물이 지원되는 환경에서 유아의 걸음걸이를 어떻게 다시 끌어낼 수 있는지 보여주는 연구처럼, 나은 지원이 제공될 때 더 많은 행동을 배우기가 쉽고 이전에 획득한 능력을 더 쉽게 끌어낼 수 있다. 움직임을 통한 자각(awareness through movement: ATM)에서는 단순히 누워서 움직임을 하는 것만으로도 사람들이 직립 상태에서 할 수 없는 다양한 움직임을 수행할 수 있다. 이것은 아마도 반중력 근육의 노력 감소, 균형 요구 사항의 감소 또는 제거, 바닥에 닿을 때 더 큰 표면적과 높은 운동 감각의 감도 때문일 것이다.
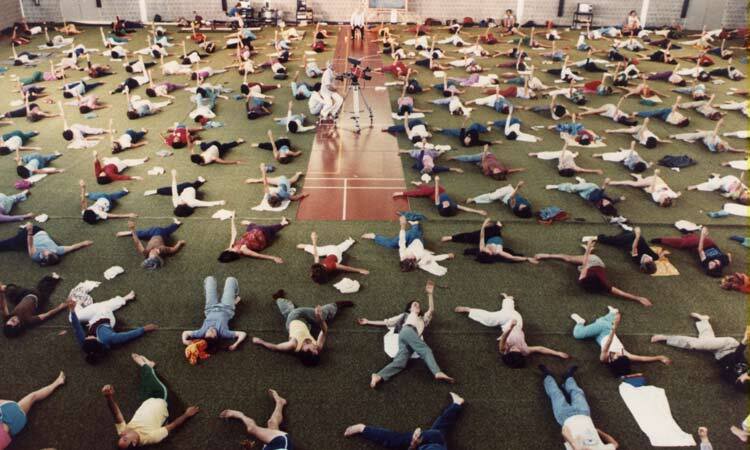
움직임을 통한 자각(awareness through movement: ATM)
지원을 활용하는 Feldenkrais의 근거 중 일부는 베버-페히너(Weber-Fechner) 현상이 작동하여 학습에 필요한 차별(discriminations)을 강화한다는 지각적(perceptual) 주장이다. 작은 조명의 변화는 더 낮은 수준의 배경 조명에 대해서만 인지될 수 있는 것처럼, Feldenkrais는 근육 능률(efficiency)의 작은 변화는 감소 된 노력의 배경에 기대서만 등록될 수 있다고 주장했다. 이러한 이유로 Feldenkrais는 종종 학생들에게 학습의 초기 단계에서 아주 작은 움직임을 사용하도록 조언했다. 지원을 통해 동작이 촉진되면 근육의 노력이 감소하여 움직임 조직의 차이가 인식되고 학습될 수 있는 임계값(threshold)이 낮아진다.
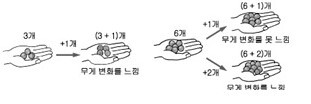
베버-페히너(Weber-Fechner) 법칙
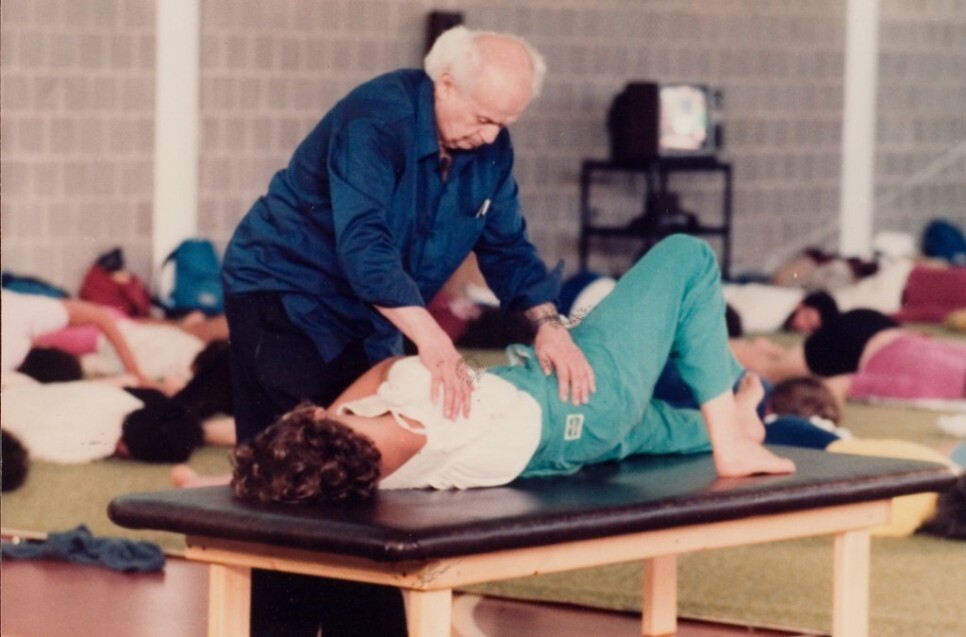
기능 통합(FI)에서는 근육의 노력을 줄이기 위해 롤러, 베개를 사용한다. 그리고 특히 시스템에 관여하는 자세적 작업을 완화하기 위해, 학생의 몸을 지지하는 방식으로 프랙티셔너의 손을 사용하게 된다. Gibsonian의 의미에서 지원은 단순한 기계적 의미가 아니라 생태학적 의미로써 행동에 대해 신뢰할 수 있는 것으로 인식된다. 이것은 자세를 취하는 근육의 노력을 완화하고 행동지각(action-perception) 가능성의 영역을 확장한다.
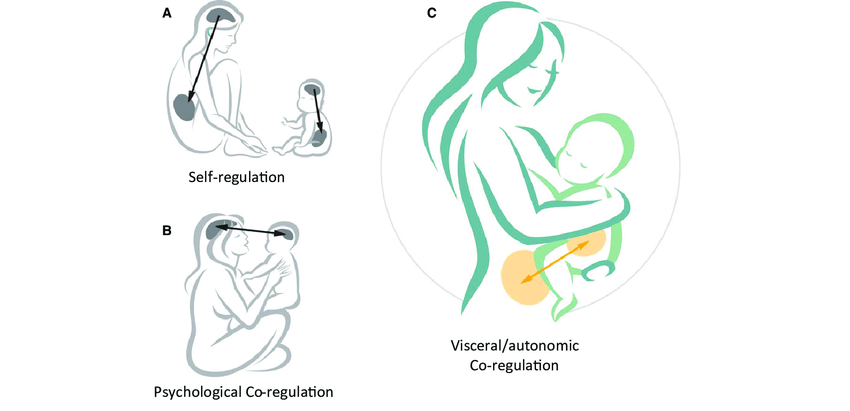
또한 Fogel의 공동규제(co-regulation) 개념에 비추어 볼 때 지원을 제공하는 것은 활동 구조(framework of the activity) 내에서 의사소통을 구축하는 데 도움이 되는 것으로 이해할 수 있다. 활동(activity)에 대한 관련 정보는 참여자가 행위 노력(action's effort)의 상대적 역할을 협상(negotiate)할 때 전달된다. 실용적인 가치와 이론적 도전에 있어 특히 흥미로운 것은 학생이 치료 테이블에 누워 있는 동안 발을 밀거나 척추 또는 머리를 들어 올리는 것과 같이 종종 수행되는 매우 정교한(sophisticated) 수기(manual) 절차이다. 이를 수행하는데 수년간의 훈련이 필요하다. 하지만 이를 정확하게 수행한다면 엄청나게 복잡한 자세적 행동 패턴을 지원하고 이에 대한 정보를 전달할 수 있다. 단적으로 Feldenkrais는 당신이 한 사람의 습관적인 패턴으로부터 뇌에 백지상태(tabula rasa)를 생성할 수 있다고 말하기까지 했다. 당연히 과장된 표현이지만 그럼에도 불구하고 관찰되는 것은 끌개의 엄청난 불안정화이다다. 놀라운 정도의 가소성(plasticity)이 발생하여, 시스템이 새로운 끌개 상태로 들어갈 수 있게 된다.
Feldenkrais는 새로운 움직임 학습이 어떻게 이전의 학습과 시스템의 내재적(intrinsic) 가능성을 활용하는지에 대해 강조했다.
예를 들어:
a) 10대 후반, 팔레스타인에서 개발한 호신술(self-defense techniques) 대한 초기 접근에서 Feldenkrais는 칼 공격에 저절로 일어난(spontaneous) 방어 반응을 관찰했다. 그런 다음 그는 이미 존재하는 패턴에 접목(grafted)하고 조율(tuned)하는 방어 기술을 발명했다.
b) 우리는(휄든크라이스 프랙티셔너) 새로운 행동을 가르칠 때 종종 재활 치료사를 구속하는 "정상성(normalcy)"에 대한 생각과 상관없이 기존의 움직임 패턴을 조율하거나 개선한다. 예를 들어, 관절 부상 후 다시 걷도록 가르칠 때, 외상(trauma)에 대처하기 위해 나타난 절뚝거리는 패턴을 용이하게 할 수 있다. 그런 다음 환경을 바꾸거나 과제 요구 사항을 변경하여 점차 레퍼토리를 확장할 수 있다. 반대로 일부 치료사가 기존의 적응 패턴을 무시하고 "정상성" 범위를 통해 강제로 사람을 움직이려고 하는 경우, 그 사람은 방어적으로 반응하고(실제로 통증 피하는 패턴이 더 안정되게 된다) 새로운 학습을 받아들이지 않는다. Feldenkrais는 외상 후 발생하는 적응적 변화를 설명하기 위해 정형외과(orthopedics)만이 아니라 학습 이론(learning theory)이 필요하다고 강조했다. 그리고 재활의 역할은 기계적인 것이 아니라 체계적(systemic)인 것이다. 심각한 부상과 치유를 받은 후에는 아무리 좋은 상황에서도 단순히 기능을 회복하고 이전 패턴과 동일하게 행동하지 않는다. 외상 후 행동은 독특한 행동 문제에 대한 창의적인 해결책이다. 또한 새로운 방법을 통해 이전보다 더 나은 기능을 학습할 수 있다.
c) 내재적 다이나믹 시스템. Feldenkrais는 일부 측면에서 Kelso 실험과 유사한 내재적 다이나믹 시스템을 탐구하고 활용하는 일련의 레슨을 발명했다. 이들 중 일부는 등을 대고 누워서 수행되는 리드미컬한 발목 굴곡(flexion)을 통해 생성되는 진동 운동을 수반한다. 이러한 움직임의 진자(pendulum) 특징 때문에 협응(coordination)에는 이전 밀기와 복귀 운동 에너지가 소실되었을 때(예: 그네 위에서 아이를 미는 것과 같이) 밀어내는 방법을 찾는 것이 포함된다. 주파수나 필요한 힘은 다이나믹 시스템에서 나오기 때문에 따로 지정할 필요가 없다. 이러한 변형을 수행한 후에 자세가 크게 개선되는데 그것은 아마도 중력의 압축을 조직하는 직립자세 요구와 유사한 방식으로 골격을 통해 (반-중력 작업 없이) 압축력이 얼마나 효율적인지 지각하는 법을 배우기 때문일 것이다. 다리나 신체의 다른 부분을 들어 올리거나 떨어뜨리는 것과 관련된 다른 수업 시리즈에서는 신경 협응(neural coordination)이 아니라 구조적-기능적 관절 및 사지 속성에 의존하는 사지 간 협응(inter- limb coordination)을 배운다. 물리학자로서 Feldenkrais는 움직임이 자기 조직화(self-organizing) 속성을 가질 수 있다는 사실을 매우 높이 평가했다. 또한 유도 교사로서 그는 중력(gravity), 운동량(momentum) 및 기타 물리적 힘(physical forces)을 활용하는 것이 무엇을 의미하는지 알고 있었다.

여기에는 행동이 학습되었을 때 다른 기술로 이전(transferred)될 수 있다는 보조적 협응에 대한 생각도 내포되어 있다. Feldenkrais는 행동의 구성 요소를 보조적인 협응에서 구성하고 분해하는 방법을 이해했다. 하지만 이것은 국소적인 근력 요소를 강조하는 환원주의적 행동 모델과는 현저히 다르다.
'소마 soma > 휄든크라이스 메소드' 카테고리의 다른 글
| 내 몸에 적용하는 펠덴크라이스자신의 몸 진단하기·동작 익히기 (0) | 2022.01.16 |
|---|---|
| [Feldenkrais Method and Dynamic Systems]Mark Reese(2018) 칼럼 번역 3편 (0) | 2022.01.11 |
| [ Feldenkrais Method and Dynamic Systems ] Mark Reese (2018) 칼럼 번역 1편 (0) | 2022.01.11 |
| 휄든크라이스와 신경가소성 (0) | 2022.01.04 |
| 턱관절 운동: 혀운동 (0) | 2022.01.02 |